Table of Contents
5.1 INTRODUCTION
5.1.1 Understanding Surfaces
Surfaces are co-dimension one objects in a space. They are important because they can divide up space. We can confine water in a bottle. This is not possible for co-dimension two. You can not confine water in a curve. Similarly, if you lived in -dimensional space, you could not store water in a two-dimensional surface. But things can get tricky already in three dimensions. There are two-dimensional closed surfaces which do not confine any space. Try to drink from a Klein bottle!
5.1.2 Describing Surfaces
A surface can mathematically be described in two fundamentally different ways. It is either given as a level surface of a function on that space. Or then it can be the image of a map called parametrization. You know this from the earth, which is a sphere. We can either say that a sphere is the set of points which have a fixed
distance to its center point. Or then we can parametrize the sphere, for example using longitude and latitude. A plane through the can be given either as the kernel of a matrix or then as the image of a matrix. The first writes . The second writes the plane as , where , are the column vectors of and gives the parameters.
5.2 LECTURE
5.2.1 Linear Manifolds and Spaces
If is a matrix, the solution space of a system of equations is called a linear manifold. It is the set of solutions of translated so that it passes through one of the points. The equation for example describes a line in passing through and . The solutions to form a linear space, meaning that we can add or scale solutions and still have again solutions. We can rephrase the just said in that a linear space is a linear manifold which contains . For example, for we get a plane which is parallel to the plane . The former is a linear manifold (also called affine space), the later is a linear space. It is the solution space to with and . Both planes are perpendicular to . To find an equation for the plane through points , define then write down , where is obtained by plugging in a point. The cross product comes handy.
5.2.2 Normal Vectors and Planes
The following important example deals with in .
Theorem 1. The vector is perpendicular to the plane .
Proof. Given two points , in the plane. Then we have and . Then is a vector inside the plane. Now . This means that is perpendicular to the vector . ◻
In three dimensions, this means that the plane has a normal vector . Keep this in mind, especially because is our home.
5.2.3 Kernels and Images of Matrices
This duality result will later will identified as a fundamental theorem of linear algebra. It will be important in data fitting for example. The kernel of a matrix is the linear space of all solution . The kernel consists of all roots of . The image of a matrix is the linear space of all vectors . We abbreviate for the kernel and of the image. We will come back to this later.
Theorem 2. The image of is perpendicular to the kernel of .
Proof. If is in the kernel of , then . This means that is perpendicular to each row vector of . But this means that is perpendicular to the column vector of . So, is perpendicular to the image of . This line of argument can be reversed to see that if is perpendicular to the image of , then it is in the kernel of . ◻
5.2.4 Exploring Non-Linear Surfaces
Given a function , the solution set is a hyper surface. We often say "surface" even so "surface" is reserved to . The simplest non-linear surfaces are quadratic manifolds defined by a symmetric matrix and a row vector and a scalar . We assume that is not the zero matrix or else, we are in the case of a linear manifold. We also can assume to be symmetric . For notation, we write and .
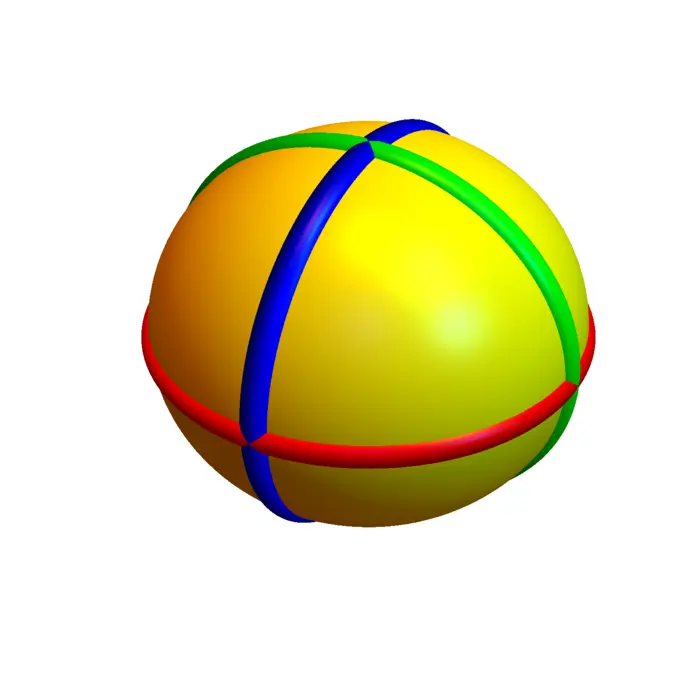
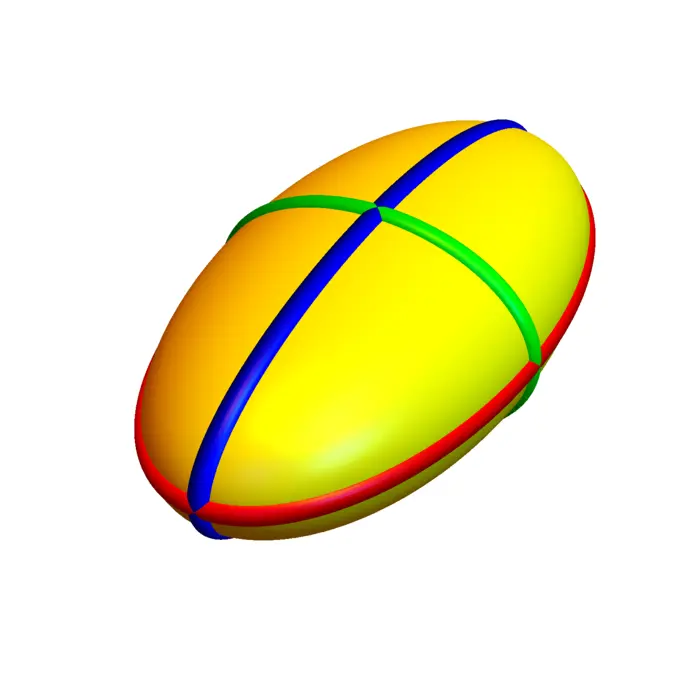
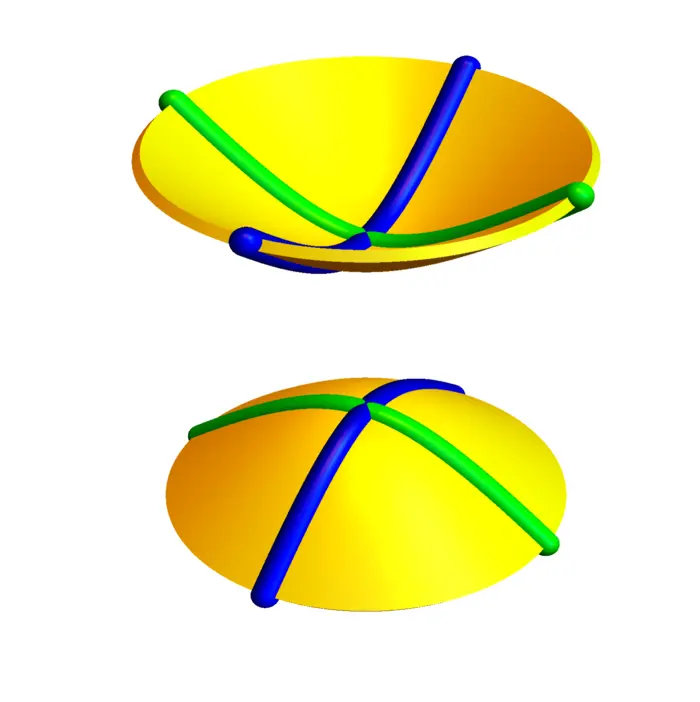
5.2.5 Ellipsoids
For and and we get the sphere . In , a sphere is a circle . In three dimensions we have the familiar sphere . An more general ellipsoid with is . By intersecting with or or , we see traces, which are all ellipses.
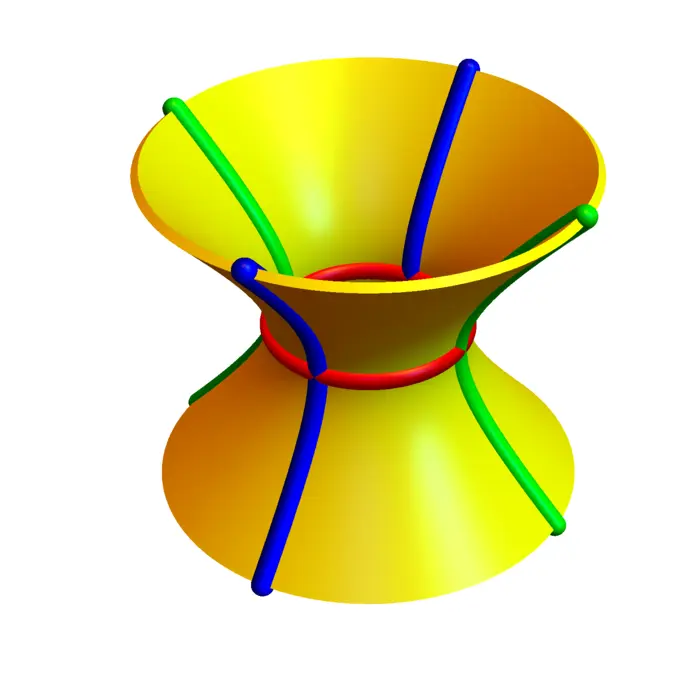
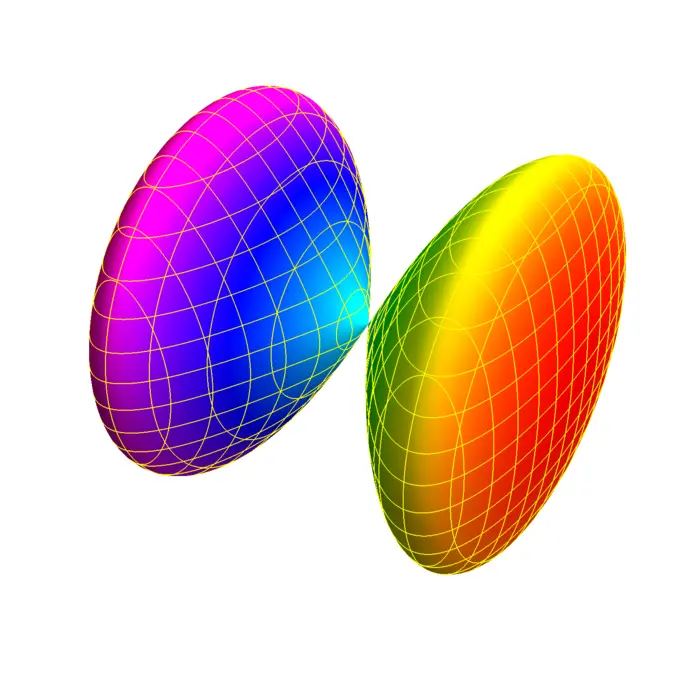
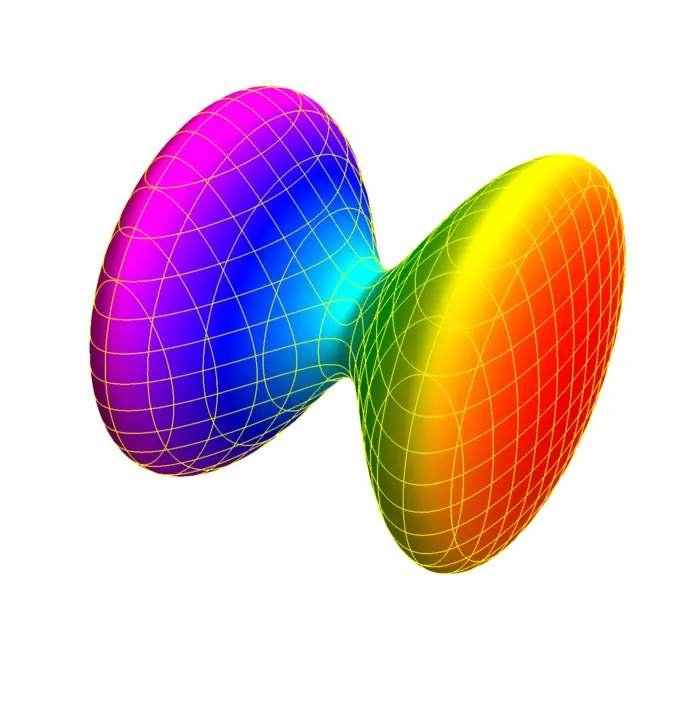
5.2.6 Hyperboloids
For and , we get a one-sheeted hyperboloid . For and , we get a two-sheeted hyperboloid . A more general hyperboloid is of the form with . The intersection with gives in the one-sheeted case a circle, in the two-sheeted case nothing. The trace or the trace are both hyperbola.
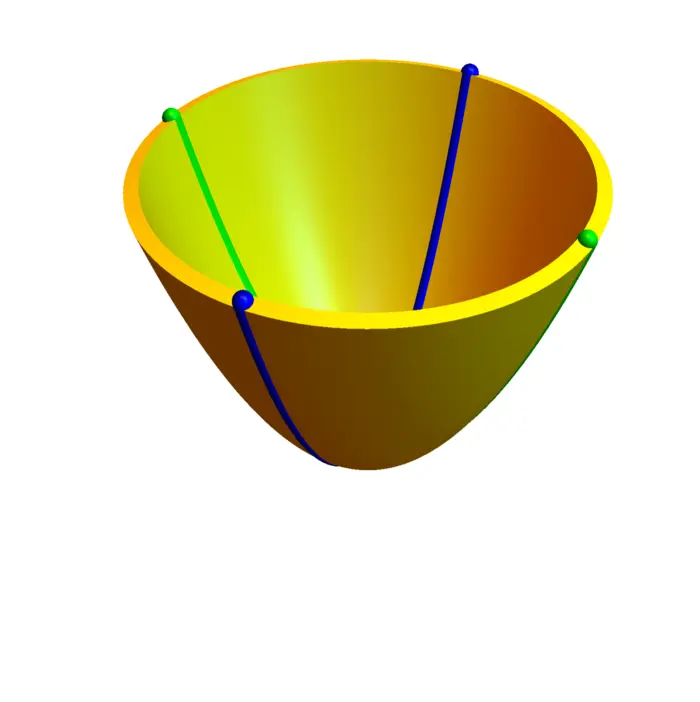
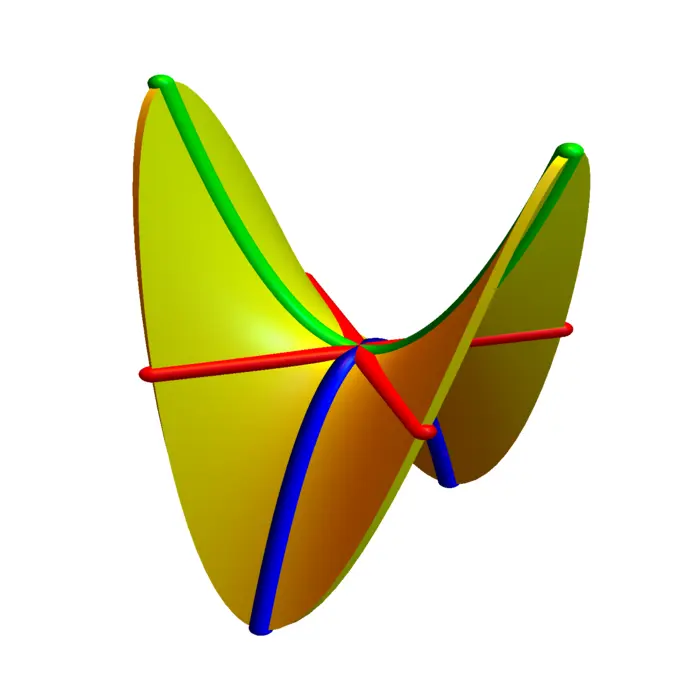
5.2.7 Paraboloids
For and and we get the paraboloid , for and and we get the hyperbolic paraboloid . We can recognize paraboloids by intersecting with or to see parabola. Intersecting the elliptical paraboloid with gives an ellipse. Intersecting the hyperbolic paraboloid with gives a hyperbola.
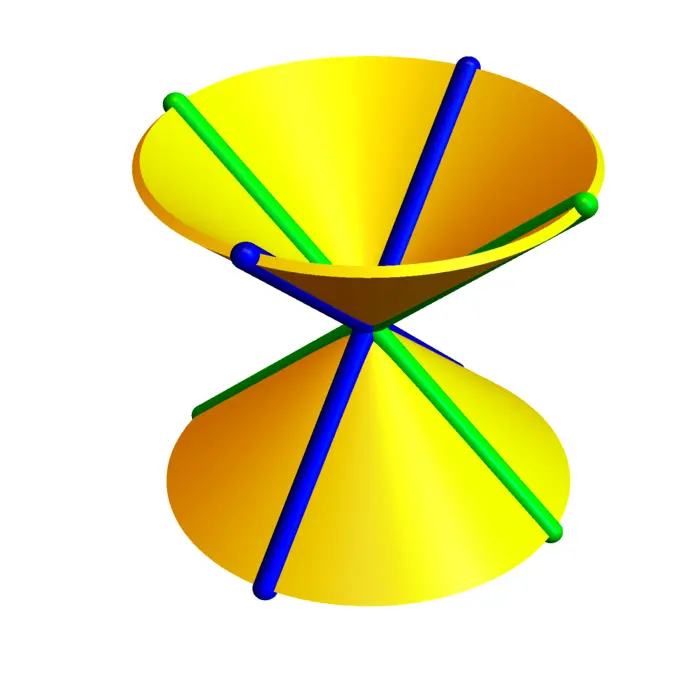
5.2.8 Special surfaces
If and , we get a cone . For and we get the cylinder .
5.2.9 Side Remark: Algebraic Structures and Forces
The -sphere and the -sphere carry a multiplication: is in the complex numbers and is in the quaternions . The -sphere is the gauge group for electromagnetism, the -sphere (also called ) is responsible for the weak force. No other Euclidean sphere carries a multiplication for which is smooth. Michael Atiyah once pointed out that this algebraic particularity might not be a coincidence and responsible for the structure of the standard model of elementary particles (one of the most accurate theories ever built by humanity). The strong force appears as one can let a set of matrices act on . Atiyah suggested that gravity could be related to the octonions . There carries still a multiplication, but it is no more associative. The list of normed division algebras , , and .1
5.2.10 Polynomial Surfaces: Varieties
Given a polynomial of variables, one can look at the surface . It is called a variety.
5.3 EXAMPLES
Example 1. Q: Find the plane containing the line and the point .
A: contains and and so the vectors and . The cross product between and is . It is perpendicular to . So, the equation is , where can be obtained by plugging in a point . This gives so that .
Example 2. Can we identify the surface ? Completion of the square gives Now . This is a two-sheeted hyperboloid centered at .
Example 3. Intersecting the cone with the plane gives a hyperbola . Intersection with gives a circle . Intersecting with gives , a parabola. Because bisecting a cone can give hyperbola, an ellipse or a parabola as cuts, one calls the later conic sections.
Example 4. The case of singular quadratic manifolds is even richer: is a cylindrical hyperboloid, is a union of two planes and . The surface is a union of two parallel planes, the surface is a plane.
EXERCISES
Exercise 1.
- What kind of curve is ?
- What surface is ?
- Let be the set of points for which . Describe this set.
Exercise 2.
- What kind of curves can you get when you intersect hyperbolic paraboloid with a plane?
- Explore what you get if you intersect the hyperboloid with the rotated by degrees around the -axes.
Exercise 3. Find explicit planes which when intersected with the hyperboloid produces an ellipse, or a hyperbola or a parabola.
Exercise 4. Find the equation of a plane which is tangent to the three unit spheres centered at , , .
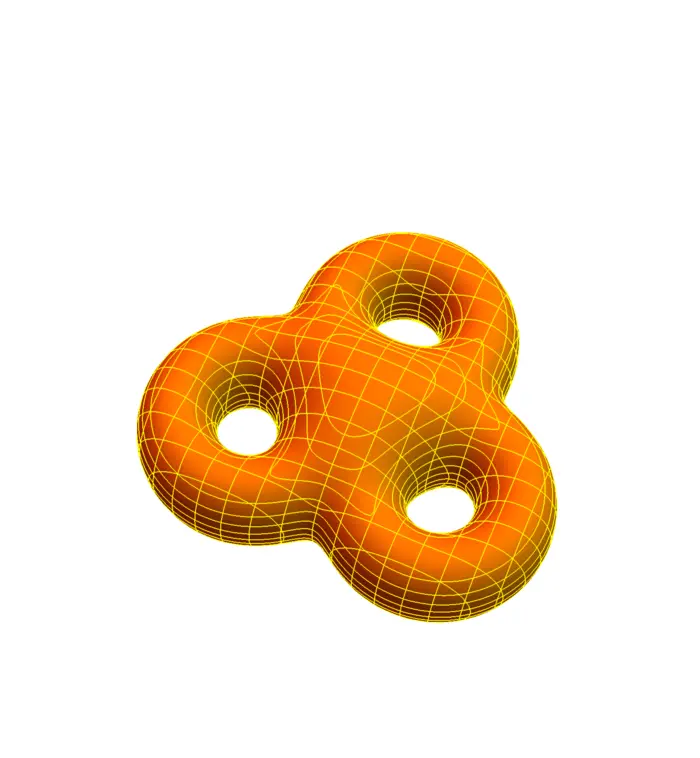
Exercise 5. Build a concrete function of three variables such that some level surface is a pretzel, a surface with three holes. Hint: the surface is the union of the surfaces and . Now, can produce surfaces in which things are glued nicely. If you should look up a surface on the web or literature, you have to give the reference. You can use the computer to experiment, or then describe your strategy in words.

- See the talk of 2010 of Atiyah (https://www.youtube.com/watch?v=zCCxOE44M_M).↩︎