Table of Contents
1.1 INTRODUCTION
1.1.1 Exploring the Pythagorean Theorem: Its History and Significance
In this first lecture, we look at one of the most important theorems in mathematics, the theorem of Pythagoras. The historical roots of the theorem are mesmerizing: the first examples of identities like
1.1.2 Redefining Vectors
We use here the theorem also while introducing vectors and linear spaces. The language of matrices is not only a matter of notation, but also allows for a slightly more sophisticated approach to vector calculus in which one distinguishes between column vectors and row vectors. Unlike in standard vector analysis courses, this is possible when working closer to linear algebra. Traditionally, many sources define a vector as a quantity with "magnitude" and "direction". This is highly problematic as a "movie" qualifies for this notion: it has a length and has a director. But we don’t need to mock this with a pun: the zero vector
1.1.3 Matrix Foundations in Data Analysis
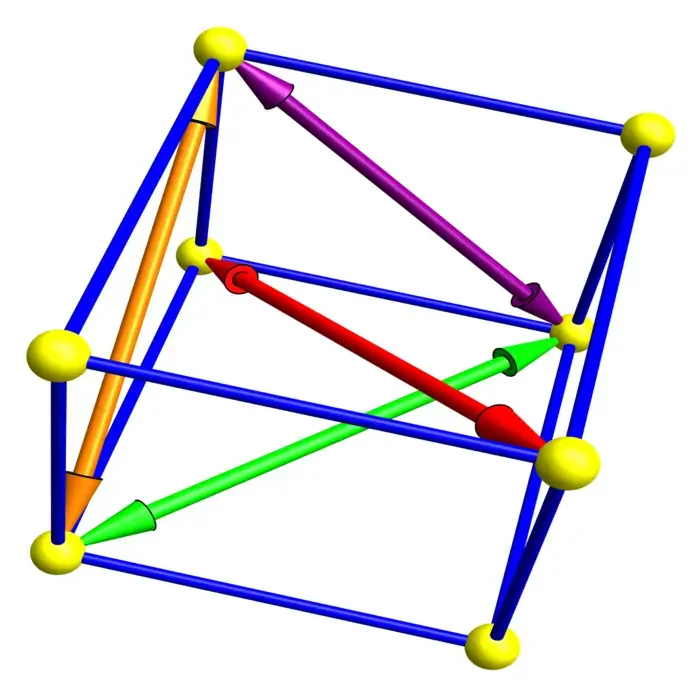
In any case, introducing spaces of matrices early has advantages also in a time where data analysis is recognized as an important tool. Relational data bases are founded on the concept of matrices. Most familiar are spread sheets which are two-dimensional arrays in which data are organized. More recently, such concept are also displaced with more sophisticated data structures like graph data bases. Still, a graph can also be described by matrices. Given two nodes
1.2 LECTURE
1.2.1 Matrix Essentials
A finite rectangular array
1.2.2 Vector Space of Matrices
Denote by
1.2.3 Euclidean Spaces, Dot Products, and Length
The space
1.2.4 Cauchy-Schwarz Inequality
An important key result is the Cauchy-Schwarz inequality.
Theorem 1.
Proof. If
1.2.5 Angle Between Two Vectors
It follows from the Cauchy-Schwarz inequality that for any two non-zero vectors
1.2.6 Law of Cosines
Two vectors
Corollary 1.
Proof. We use the definitions as well as the distributive property (FOIL out):
1.2.7 Understanding the Pythagorean Theorem: A Special Case of the Law of Cosines
The case
Theorem 2. In a right angle triangle we have
1.3 EXAMPLES
Example 1. The dot product
Example 2. The dot product of
Example 3.
Example 4. Find the angles in a triangle of length
Answer: Al Kashi gives
1.4 ILLUSTRATION

1.4.1 Infinite Horizons in Mathematics
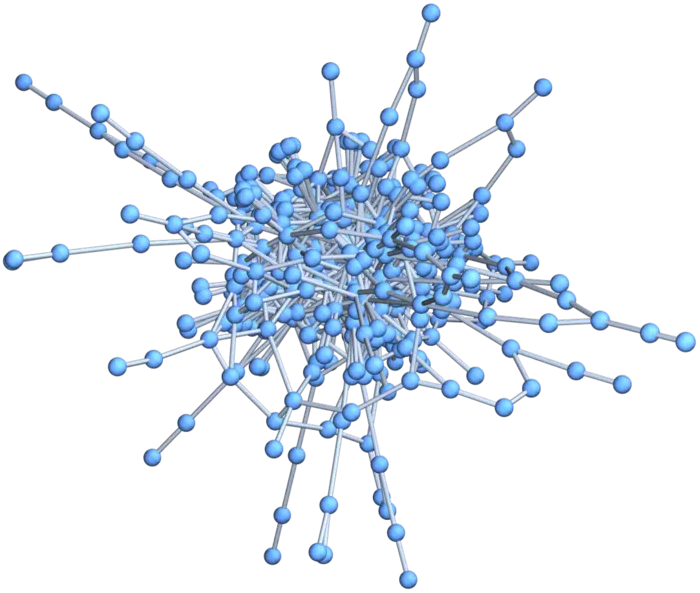
Mathematics is not only eternal, but also infinite. To illustrate this, look at the "Eternals" problem.1 Define the Babylonian graph
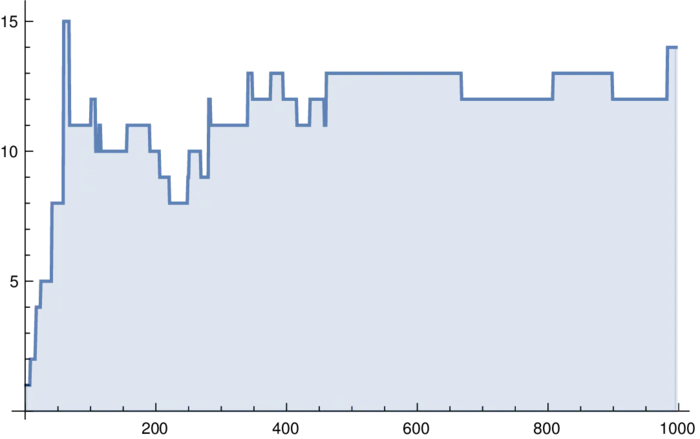
ListPlot[Table[GraphDiameter[Babylonian[n]],n,1000]] gives the diameter of the largest component EXERCISES
Exercise 1. Use the definitions to find the angle
Exercise 2. Given the matrix
- Find
, then build and . The first matrix is called symmetric, the second is called anti-symmetric. - Compute
and . Then evaluate and . - Why are these two numbers computed in b) the same? Is it true in general for two
matrices that ? (There is a short verification using the sum notation).
Exercise 3.
- Verify the triangle identity
in general by FOILing out , then generate an example of two vectors with integer coordinates in the plane , where one can apply this. Draw the situation. - Verify that if
and have the same length, then and are perpendicular. Describe the situation in b) geometrically in a sentence.
Exercise 4. Write the vector
Exercise 5.
- Find two vectors in
for which all coordinate entries are or and which are both perpendicular to each other. - Design four vectors in
for which all coordinate entries are or which are all perpendicular to each other.
Optional: can you invent a strategy which allows you for example to find
- This problem has been communicated to us by Ajak, who knows thousands of years of mathematics↩︎